New Venture Creation: A Drift-Variance Diffusion Control Model
- Hurratul Maleka Taj
- Nov 10, 2025
- 7 min read
Citation: Zhengli Wang, Stefanos Zenios (2021) New Venture Creation: A Drift-Variance Diffusion Control Model. Operations Research 70(5):2982-2997.
Note 1: This research review presents an analytical synthesis of the referenced paper, focusing on its core mechanisms and underlying logic.
Note 2: To ensure full fidelity of mathematical notation, symbols and formatting, Sections 3–9 are displayed as images. This avoids rendering distortions common in web publishing environments and preserves the technical integrity of the analysis.
Section 1. Model Setup, Objective, Variations, and Claimed Results
This paper models new venture creation using a drift–variance diffusion control framework, where the venture’s state is represented by a diffusion process. The entrepreneur chooses costly controls that determine both the drift and the variance of this diffusion process.
The venture ends when the process hits one of two boundaries. If the process reaches an upper boundary, the venture succeeds and the entrepreneur receives a reward. If the process reaches a lower boundary, the venture fails. The entrepreneur chooses between two different controls and seeks to determine the policy that maximizes the expected total reward minus total cost.
The paper considers two variations of the model:
Both boundaries are fixed.
Only the upper boundary is fixed, but the lower is free.
Within these model variations, the authors derive closed-form expressions specifying conditions under which the optimal policy is dynamic versus static. They also prove a structural property of the optimal policy: when the optimal policy is dynamic, it switches between the two controls at most once.
The stated results highlight a “subtle trade-off” across the costs of the controls, their drifts, and their variances, under which more expensive controls may be utilized more than less expensive controls. In addition, the authors state that in the fixed boundary case, the entrepreneur may wastefully use a more expensive control near the lower boundary in order to avoid hitting that boundary. The authors interpret this as implying that efficient utilization of the two controls cannot happen when the entrepreneur does not have the freedom to choose when to abandon the venture.
Key terms explicitly associated with the paper are: stochastic control, stochastic differential equation, Hamilton–Jacobian–Bellman equation, dynamic programming, and entrepreneurship.
Section 2. Introduction and Positioning of the Model
The paper seeks to capture key salient features of new venture creation, which typically unfolds across multiple stages. In early stages, ventures are characterized by a business concept and preliminary supporting evidence, while later stages involve revenues and sales. At each stage, investors provide capital conditional on the venture meeting stage-specific milestones; if milestones are not met, the venture is abandoned. Throughout this process, the entrepreneur undertakes costly activities aimed at creating value and achieving these milestones, with success leading to further funding and failure resulting in abandonment. Both milestones and activities vary by venture type and stage.
Two real-world examples illustrate this process. Doordash progressed through funding rounds as it expanded the number of markets and customers served, using early capital to generate sufficient sales before raising additional funds for expansion. Genomic Health, by contrast, faced early milestones related to regulatory approval and later milestones tied to sales, pursuing diverse activities such as clinical studies, publication, reimbursement negotiations, and consumer advertising. In the context of the model, the state of the venture is represented by a Brownian motion, and the activities correspond to different control actions.
Motivated by these examples, the model represents venture creation as a Brownian motion whose drift and variance are controlled by the entrepreneur. The process terminates when it reaches an upper boundary, interpreted as success with an associated reward, or a lower boundary, interpreted as failure. The entrepreneur chooses between two controls, each associated with a distinct drift-variance pair and cost. The upper boundary is fixed, typically determined by investors, while the lower boundary may be fixed or free: in the former case it is set by investors, and in the latter it is chosen by the entrepreneur. In the examples, the Brownian motion represents the number of active customers for Doordash and a sales measure for Genomic Health, while the controls represent marketing and promotional activities.
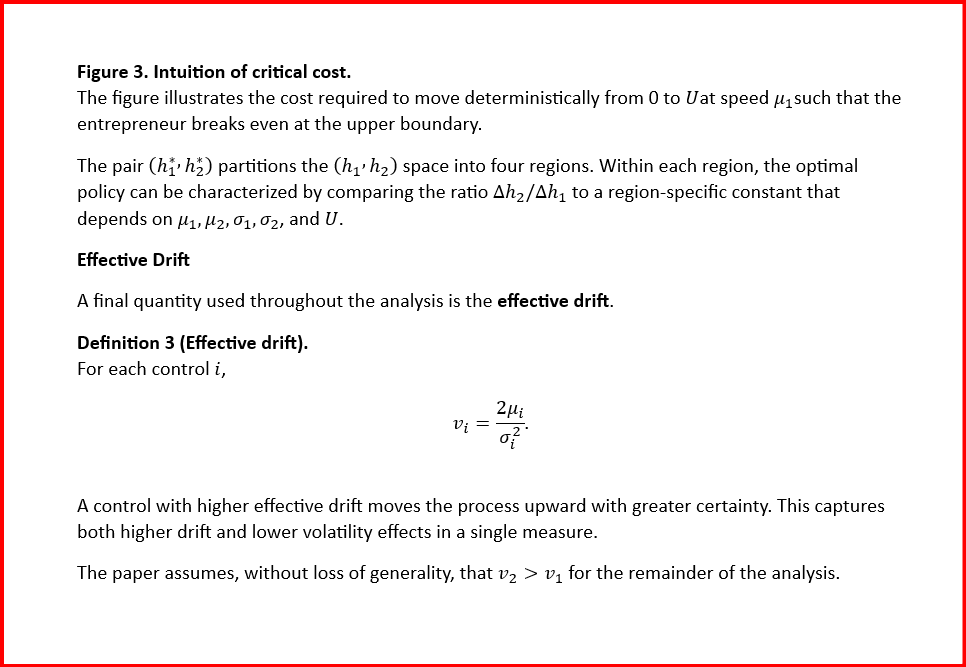
The paper’s main results are summarized as follows. In the fixed boundary case, the optimal policy is either a single-control policy or a dual-control policy in which each control is used over a single contiguous interval with a single switching point. The authors derive closed-form expressions for the optimal policy, its value function, and the necessary and sufficient conditions for optimality. The optimal policy is fully characterized by four parameters: the deviations of the two control costs from a critical cost threshold, and the effective drift of each control, defined as two times the drift-to-variance ratio. A single-control policy is optimal when one control has a clearly lower cost deviation or a clearly higher effective drift, or both; otherwise, a dual-control policy is optimal. A trade-off between cost and effective drift is identified, particularly when both control costs are below the critical thresholds, with the higher effective drift control being used closer to the lower boundary in the dual-control case.
The paper also analyzes a model in which the lower boundary is free, representing environments where entrepreneurs can choose when to abandon the venture. The upper boundary is not treated as free because it is rarely under entrepreneurial control. Analyzing both the fixed and free boundary problems yields two benefits: it highlights unintended behavioral consequences arising from a fixed boundary, and it enables a complete closed-form characterization of optimal control policies in the free boundary case. These results take the form of switching curves that partition the two-dimensional space of control costs into regions where the optimal policy is single-control or dual-control.
Additional motivation is drawn from the new product development literature, the lean startup literature, and the diffusion control and investment under uncertainty literature. Relative to prior work, the paper assumes a standard Brownian motion rather than a geometric one to reflect incremental progress, excludes discounting due to the short startup horizon, allows dynamic switching of controls, and does not incorporate games. Compared to closely related models with switching, the paper differs by allowing a free lower boundary, deriving explicit closed-form solutions, and providing a simple heuristic to guide entrepreneurs’ control choices.
The authors state six contributions:
This paper introduces a novel stochastic control model that captures key aspects of the new venture creation process.
The model generalizes the problem structure in which exerting a control introduces a three-dimensional impact - drift, variance, and cost - which is a problem previously thought to be intractable to analyze.
Because the model considers two controls and a standard Brownian motion, closed-form expressions for optimal control policies under very general conditions for the model parameters are developed. The closed-form expressions provide explicit exact relationships involving the parameters of each control.
Building on these closed-form expressions, insights on the structure of the optimal policy are extracted.
Explicit closed-form conditions under which the entrepreneur may wish to abandon the venture early or continue after the process hits the lower boundary are obtained.
A comparison between the fixed boundary case and the free boundary case provides insights and intuitive explanations for the differences, and these are a first step towards developing an applied theory framework to guide entrepreneurial decision-making within a startup.


































Section 10 - Concluding Remarks
This paper introduces a tractable stochastic control model of new venture creation by representing the entrepreneurial process as a Brownian motion subject to two alternative controls that jointly affect drift, variance, and cost. The analysis formalizes the fundamental trade-off between effective drift and control costs and derives closed-form characterizations of the optimal policy. In particular, the paper establishes precise conditions under which the optimal policy relies on a single control versus a dual-control strategy and proves that, whenever both controls are used, the optimal policy admits a single switching point. The model further characterizes when entrepreneurs optimally abandon a venture prematurely or extend its duration and shows how allowing flexibility in the abandonment boundary enables more efficient use of available controls.
This study represents an initial step toward modeling a salient aspect of entrepreneurial decision-making using tools from stochastic control. As such, it necessarily abstracts from many real-world complexities. One limitation is the assumption that the venture’s state can be summarized by a single continuously observable variable. While the state variable is interpreted as venture value, in many settings such value may not be directly observable, and commitment to lower and upper boundaries may not be irreversible. This motivates future extensions that consider partially observable states or costly state estimation. The paper also highlights that certain ventures—such as publicly traded biotech firms—may better fit the model’s assumptions, where market capitalization provides a natural and observable proxy for the state, and different clinical trials correspond to distinct controls.
A second limitation is that the model accommodates only two controls. This contrasts with prior work that allows for an arbitrary number of controls, where control effects are lower-dimensional and permit the construction of a well-defined efficient frontier. In the present setting, each control affects drift, variance, and cost simultaneously, making generalization to higher-dimensional control sets analytically challenging. Moreover, even with two controls, the ordering of controls in the optimal policy is parameter-dependent, unlike prior models where optimal control sequences are monotone. Extending the framework to multiple controls would substantially broaden the model’s scope and is left for future research.
The model also abstracts from switching costs between controls. While switching costs are economically relevant, incorporating them would significantly reduce tractability due to the possibility of infinitely many switches along certain sample paths of the diffusion process. Addressing this issue remains an open avenue for future work.
Beyond these extensions, the paper outlines two additional promising directions. The first considers entrepreneurial experimentation as sequential hypothesis testing, where the log-likelihood ratio evolves as a diffusion whose drift and variance depend on the experiment chosen, and where reputational costs arise from erroneous decisions. The second explores a principal–agent setting in which entrepreneurs select controls while investors determine the stopping boundaries, introducing strategic interactions between control choice and boundary setting.
In conclusion, this paper develops a simple yet powerful stochastic diffusion model that captures key trade-offs faced by entrepreneurs during venture creation. By focusing on the simplest analytically tractable framework, it delivers closed-form solutions and yields new—and at times counter-intuitive—insights that are relevant for both entrepreneurial practice and academic research. More broadly, the results demonstrate how the structural clarity of stochastic control models can serve as a foundational tool for understanding entrepreneurial decision-making under uncertainty.



Comments